On March 26, 2021 and March 29, 2021, the project partners from the Christian Albrechts University Kiel, Emma technologies and the Kiel University of Applied Sciences ran tests at the Katzheide outdoor swimming pool in Kiel Gaarden.
The DSVG working group of Kiel University of Applied Sciences used the HEXE demonstrator vehicle to test autonomous driving, acoustic communication using an underwater navigation system (USBL), and navigation sensor and actuator technology. In addition, sensor data from deterministic objects could be collected for sonars and stereo camera by attaching buoys and tubes to the bottom of the basin. Apart from some difficulties with the acoustic communication and a deviated drift, all tests went as planned.

Demonstrator vehicle HEXE in the pool.
The Department of Information and Coding Theory of the Faculty of Engineering at Christian-Albrechts-University of Kiel tested the optical and magnetic communication system in real water for the first time. The primary goal was to determine the water influences and interactions.
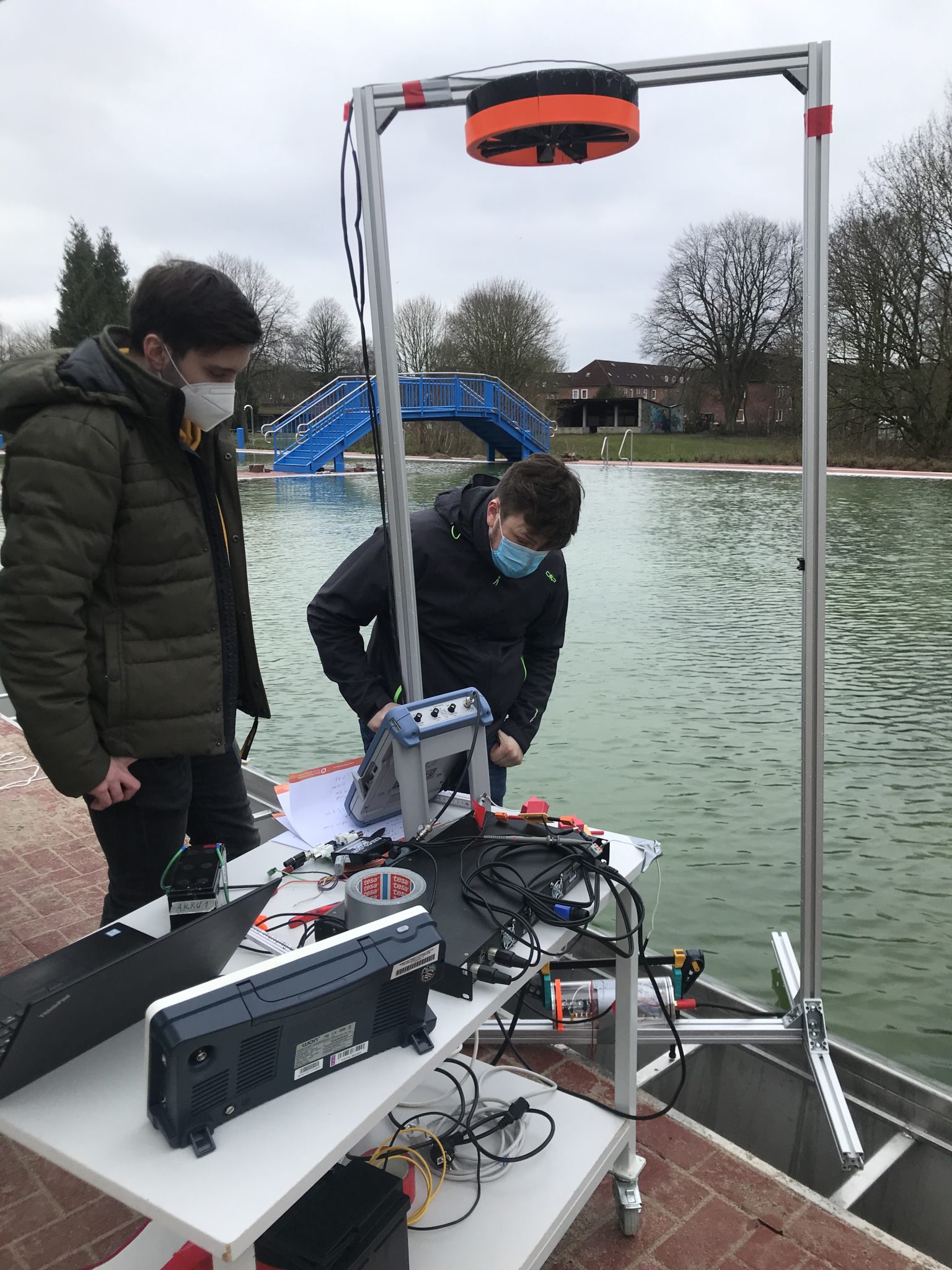
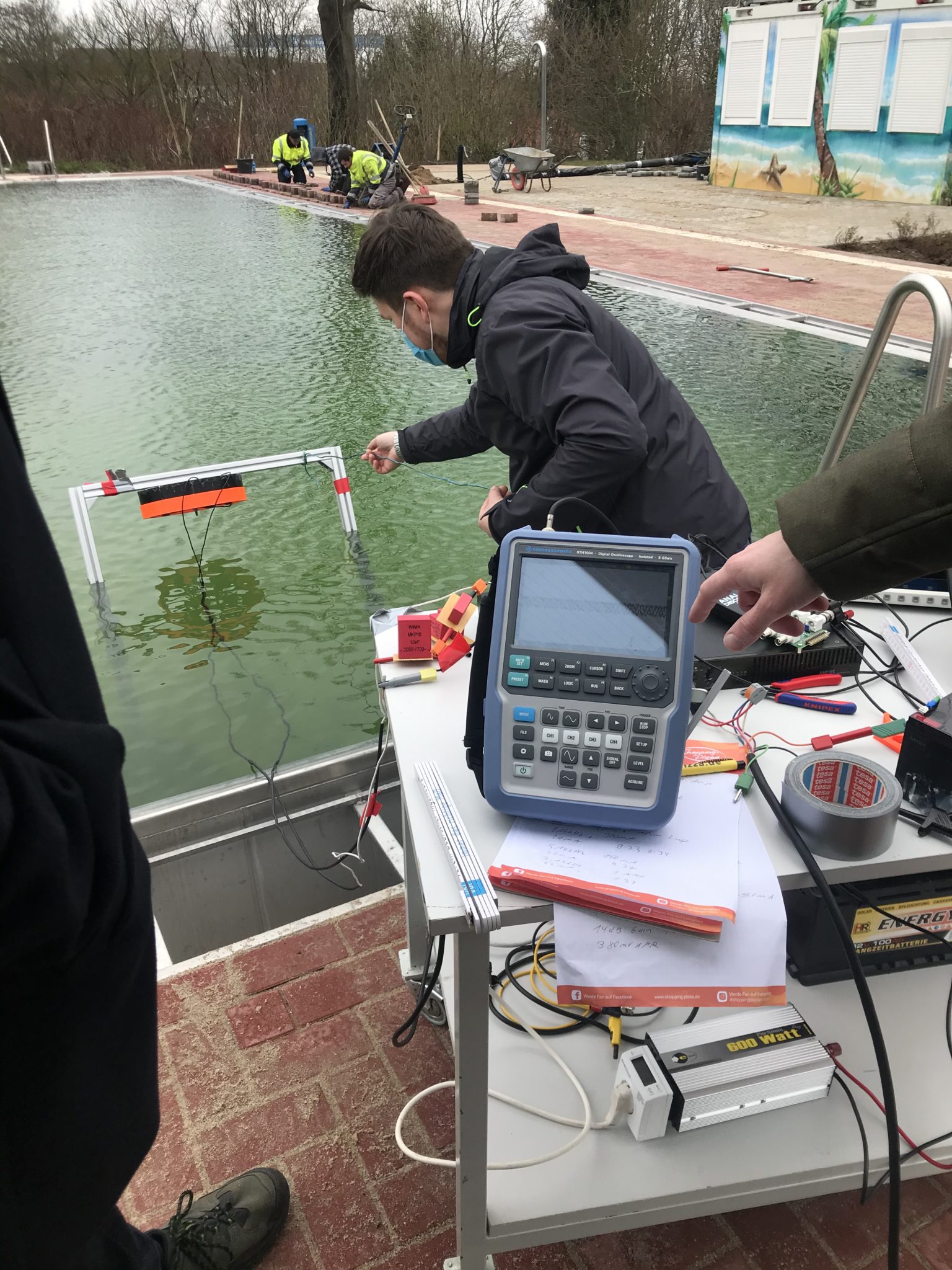
The difficulty with optical communication stems from the fact that the receiver unit consists of a photodiode or solar cell that is exposed to direct sunlight. The sun's rays generate a direct current, which is added to the alternating current of the signal transmission at the detector. Due to the strong brightness of the sunlight, the detector reaches a maximum threshold and becomes saturated, so that the LEDs cannot establish transmission. This is prevented by a grating on the receiver, which attenuates the sun's rays. The system was placed underwater at various distances to test the signals.
In addition, the influence of water on the magnetic field was tested in an almost freshwater pool. Afterwards, the measurement in the swimming pool was continued in a saltwater environment (Kiel Outer Fjord). The increase in conductivity of the water causes a loss of range. Here, the amplitude of the magnetic field was checked at different distances. All in all, assumptions could be confirmed and the collected measurement data could be used for further evaluations.

Maurice Hott and Andrej Harlakin of the Department of Information and Coding Theory of the Faculty of Technology of Christian-Albrechts-University (from left to right) with the magnetic and optical communication modules.
The colleagues of the project partner Emma technologies were represented with two ASVs (Autonomous Surface Vehicle) on the 26. March 2021. The ASVs are used for communication between the AUVs to the surface. They also provide a platform for wireless charging and optical communication.
The Skimrider is one of the surface vehicles and can hold its positions precisely by means of dynamic positioning. Due to the 4 propellers, which are set at a 30 degree angle, the Skimrider can also move sideways. The Skimrider will be used as a communication test object between the AUVs and the equipment carrier. The Skimrider proved to be successful in the test, all targeted circle points were approached automatically. Some twitches to the left and right indicate that further sensor calibration is still necessary.

Max Stickel (Digital Signal Processing Group at Kiel University of Applied Sciences) and Kay Kallerhof (emma technologies) with the Autonomous Surface Vehicle.
See more impressions here.